
جاروبک و نقش آن در الکتروموتورها
جاروبک (Brush) یکی از اجزای کلیدی الکتروموتورهای جریان مستقیم (DC) است. این قطعه کوچک اما بسیار مهم، نقش برقراری اتصال الکتریکی بین بخش ثابت موتور (استاتور) و بخش گردان (آرمیچر یا روتور) را ایفا میکند. مقاله دیگر ما را که تفاوت AC و DC را نیز بخوانید.
جاروبک معمولاً از جنس کربن گرافیتی یا ترکیبی از گرافیت و فلز ساخته میشود. این جنس باعث میشود که هم مقاومت الکتریکی پایینی داشته باشد و هم در برابر اصطکاک و حرارت مقاومت مناسبی از خود نشان دهد.
نقش اصلی جاروبک در موتور
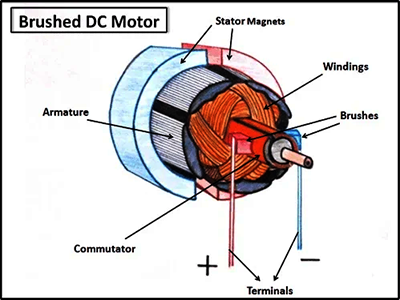
الکتروموتورهای DC برای چرخش نیاز به انتقال جریان الکتریکی به سیمپیچهای آرمیچر دارند. از آنجا که آرمیچر در حال چرخش است، نمیتوان با سیمکشی ثابت جریان را به آن منتقل کرد. در اینجا جاروبک به کمک کموتاتور (یک قطعه حلقوی متصل به آرمیچر) میآید.
جاروبک روی کموتاتور میلغزد و جریان الکتریکی را به آرمیچر منتقل میکند. در واقع جاروبک جریان DC ورودی را به بخش گردان میرساند و این کار باعث ایجاد میدان مغناطیسی در سیمپیچ آرمیچر میشود. میدان مغناطیسی تولید شده در آرمیچر با میدان مغناطیسی استاتور برهمکنش میکند و نیروی گشتاور ایجاد میشود که موجب چرخش موتور میگردد.
جنس و طراحی جاروبک
برای کاهش اصطکاک و سایش، جنس جاروبک بسیار اهمیت دارد. جاروبکهای کربنی رایجترین نوع هستند زیرا:
- نرم و رواناند.
- اصطکاک کمی ایجاد میکنند.
- حرارت تولید شده در نقطه تماس را بهخوبی تحمل میکنند.
برخی موتورها به جاروبکهای مسی یا برنزی نیاز دارند. این نوع جاروبکها در کاربردهایی با شدت جریان بالا استفاده میشوند، زیرا مقاومت کمتری دارند و جریان بیشتری را تحمل میکنند.
مشکلات و معایب جاروبک
علیرغم اهمیت بالای جاروبک در عملکرد الکتروموتور، این قطعه مشکلاتی نیز ایجاد میکند:
-
سایش:
بهدلیل تماس مداوم با کموتاتور، جاروبکها به مرور زمان ساییده میشوند و نیاز به تعویض دارند.
-
جرقهزنی:
تماس الکتریکی بین جاروبک و کموتاتور گاهی باعث ایجاد جرقه میشود که این جرقهزنی میتواند منجر به نویز الکتریکی و حتی آسیب به موتور شود.
-
تلفات انرژی:
اصطکاک مکانیکی بین جاروبک و کموتاتور باعث هدررفت انرژی و کاهش راندمان موتور میشود.
-
نیاز به تعمیر و نگهداری:
بهدلیل سایش و آلودگیهای ناشی از گرد کربن، موتورهای جاروبکدار به سرویس دورهای نیاز دارند.
به همین دلیل، با پیشرفت فناوری، صنعت به سمت استفاده از الکتروموتورهای بدون جاروبک حرکت کرده است.
الکتروموتورهای بدون جاروبک (Brushless)
الکتروموتورهای بدون جاروبک (Brushless DC Motor یا BLDC) همانطور که از نامشان پیداست، بدون استفاده از جاروبک طراحی شدهاند. در این موتورها، جریان الکتریکی توسط مدارهای الکترونیکی (درایور) و با استفاده از سنسورها و کنترلرهای پیشرفته به سیمپیچها اعمال میشود.
ساختار کلی الکتروموتورهای بدون جاروبک
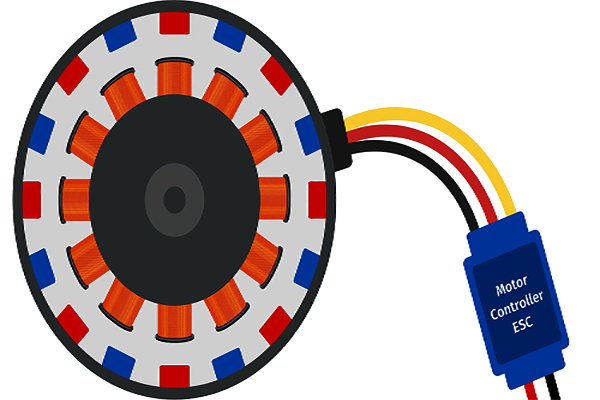
یک موتور BLDC معمولاً از سه بخش اصلی تشکیل میشود:
استاتور (بخش ثابت) در الکتروموتورهای بدون جاروبک :
در این نوع موتور، سیمپیچها به استاتور منتقل شدهاند.
روتور (بخش گردان):
در اکثر BLDCها، روتور از آهنرباهای دائمی ساخته شده است.
درایور الکترونیکی:
این قطعه جریان متناوب (معمولاً سهفاز) را در سیمپیچهای استاتور ایجاد میکند تا میدان مغناطیسی گردشی لازم برای چرخش روتور بهوجود آید.
نحوه عملکرد
در یک موتور BLDC، به جای تماس مکانیکی جاروبک و کموتاتور، کموتاسیون بهصورت الکترونیکی انجام میشود. درایور موتور نقش سوئیچینگ جریان را برعهده دارد و با تغییر جهت جریان در سیمپیچهای استاتور، میدان مغناطیسی چرخشی تولید میکند. این میدان مغناطیسی باعث میشود آهنرباهای دائمی روتور جذب یا دفع شوند و در نهایت روتور به حرکت درآید.
مزایای الکتروموتورهای بدون جاروبک
الکتروموتورهای بدون جاروبک نسبت به انواع جاروبکدار مزایای چشمگیری دارند که مهمترین آنها عبارتند از:
عدم نیاز به تعمیر و نگهداری در الکتروموتورهای بدون جاروبک :
چون جاروبک و کموتاتور حذف شدهاند، موتور نیاز به تعویض جاروبک ندارد و سرویس آن بسیار کمتر است.
عمر طولانیتر:
حذف اصطکاک مکانیکی در بخش جاروبک و کموتاتور باعث میشود قطعات کمتر فرسوده شوند و عمر مفید موتور افزایش یابد.
بازده بالا:
نبود اصطکاک بین جاروبک و کموتاتور باعث کاهش تلفات انرژی و افزایش راندمان میشود.
جرقهزنی کمتر:
چون تماس الکتریکی مستقیم وجود ندارد، جرقهزنی در نقطه تماس از بین میرود. این موضوع اهمیت ویژهای در کاربردهای خاص مثل فضاهای انفجاری دارد.
کنترل دقیقتر:
امکان کنترل سرعت و گشتاور موتور بهوسیله درایور الکترونیکی، دقت عملکرد را افزایش میدهد. این قابلیت باعث شده که BLDCها در کاربردهای دقیق مثل پهپادها، رباتها و تجهیزات پزشکی بهطور گسترده استفاده شوند.
معایب الکتروموتورهای بدون جاروبک
با وجود مزایای زیاد، BLDCها خالی از عیب نیستند:
هزینه بالاتر در الکتروموتورهای بدون جاروبک :
استفاده از درایور الکترونیکی و آهنرباهای دائمی، هزینه ساخت را افزایش میدهد.
پیچیدگی مدار کنترل:
موتورهای BLDC نیاز به درایور و کنترلر پیشرفته دارند. این موضوع طراحی و برنامهنویسی را پیچیدهتر میکند.
حساسیت به شرایط دما و رطوبت:
آهنرباهای دائمی ممکن است در شرایط خاص (دمای بالا یا رطوبت زیاد) خاصیت مغناطیسی خود را از دست بدهند.
جمعبندی
جاروبک، نقش مهمی در انتقال جریان برق به آرمیچر دارد و بخش جداییناپذیر موتورهای DC کلاسیک است. اما با ظهور الکترونیک قدرت و درایورهای هوشمند، صنعت بهسمت استفاده از موتورهای بدون جاروبک سوق پیدا کرده است. این موتورها بازده بالاتری دارند، نیاز به نگهداری کمتری دارند و در بسیاری از صنایع حساس و دقیق جایگاه ویژهای پیدا کردهاند.
امروزه با توجه به پیشرفت تکنولوژی، الکتروموتورهای بدون جاروبک در صنایع مختلف مثل خودروسازی، هوافضا، رباتیک و حتی لوازم خانگی مدرن جایگزین موتورهای جاروبکدار شدهاند. البته هنوز در کاربردهای ساده و ارزانقیمت، موتورهای جاروبکدار هم استفاده میشوند، زیرا قیمت پایین و تعمیر آسانتری دارند.
اگر نیاز به انتخاب بین این دو نوع موتور دارید، باید عوامل مختلف مثل هزینه، عمر مفید، نیاز به تعمیر و کاربرد مورد نظر را مدنظر قرار دهید. انتخاب صحیح موتور باعث میشود عملکرد دستگاه بهینه شود و هزینههای نگهداری و انرژی کاهش یابد.